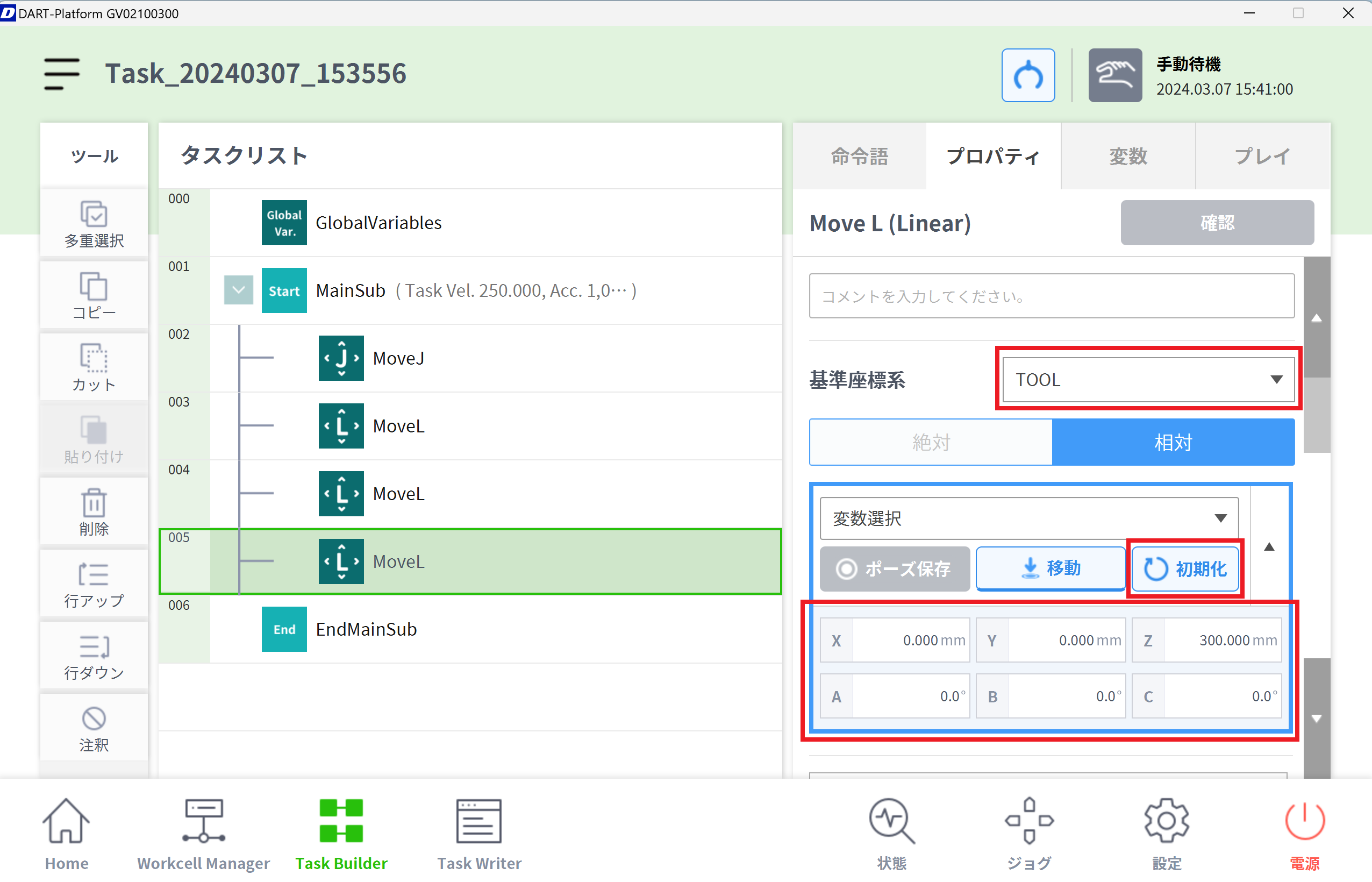
SkillでMoveLを追加し、基準座標系を「TOOL」に設定。
座標は相対に動かすため、動かしたい場所以外はすべて"0"に設定する。

初期化をするとすべての座標が"0"になるので、下記の順番で設定するのがオススメ。
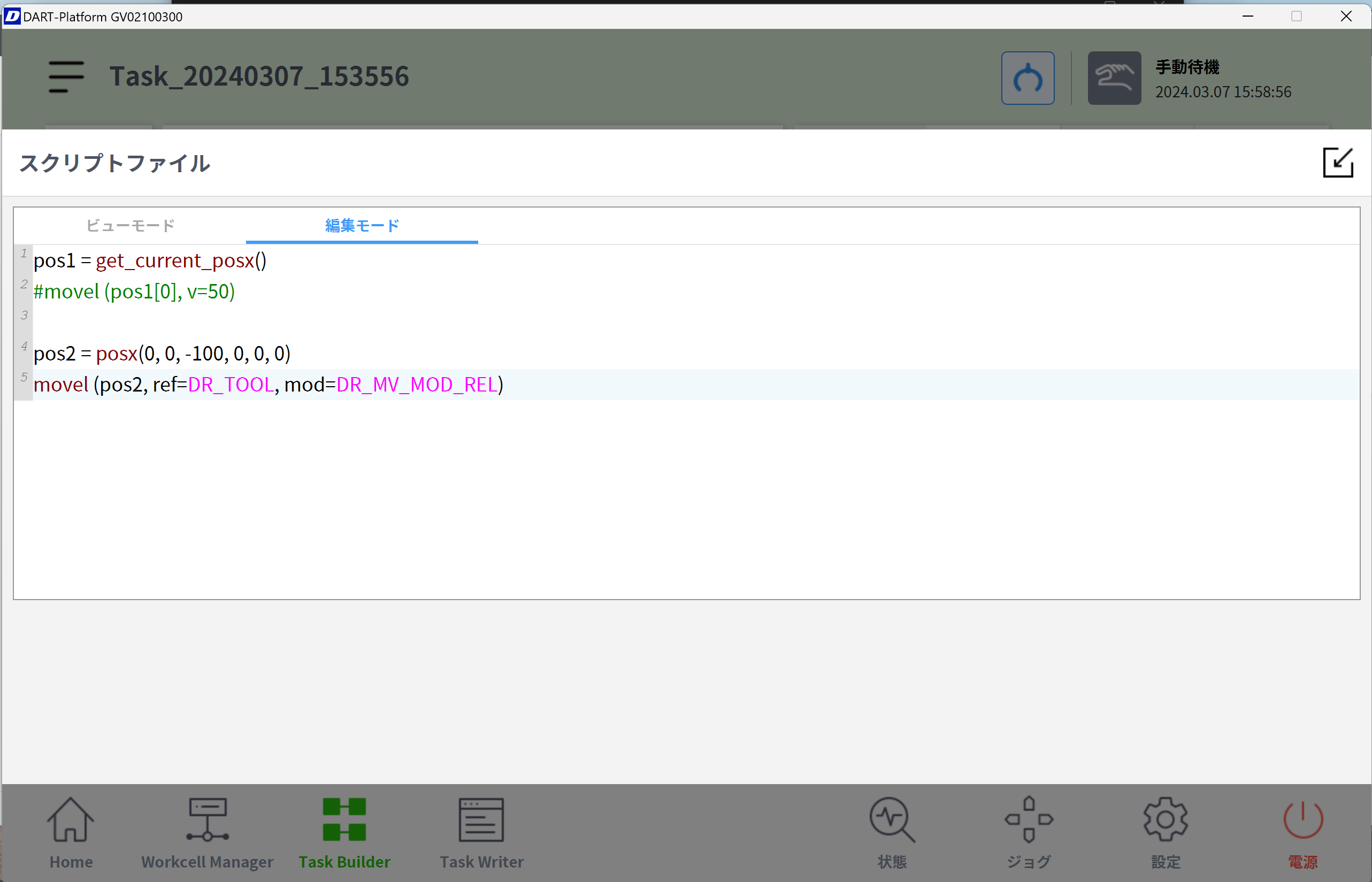
Skillだけでなく、CustomCodeから設定も可能。サンプルコードは以下。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
pos1 = get_current_posx()
#movel (pos1[0], v=50)
pos2 = posx(0, 0, -100, 0, 0, 0)
movel (pos2, ref=DR_TOOL, mod=DR_MV_MOD_REL)
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~