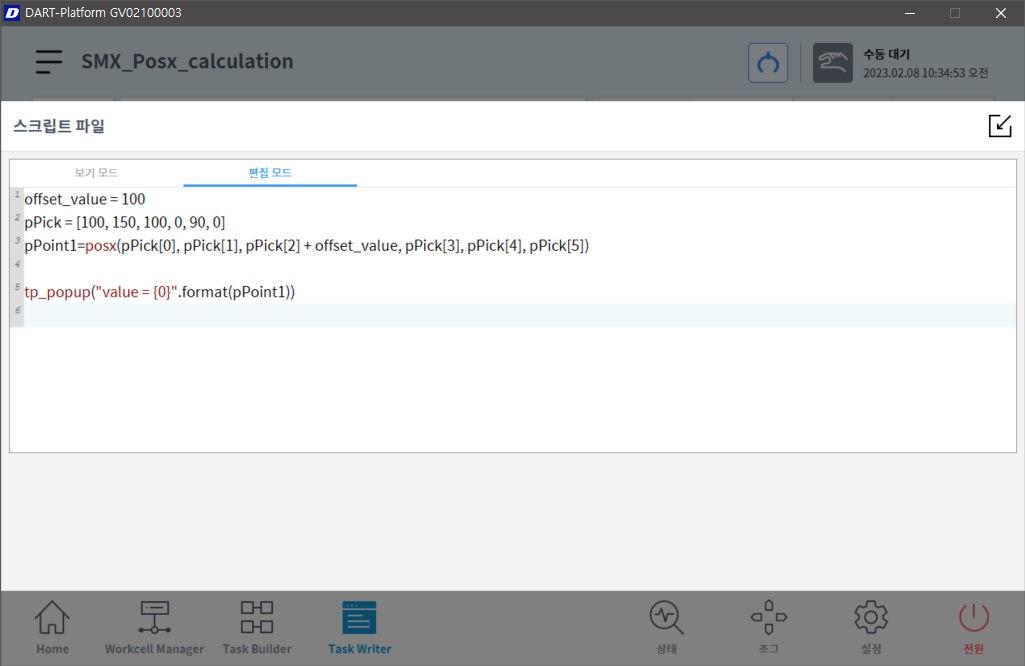
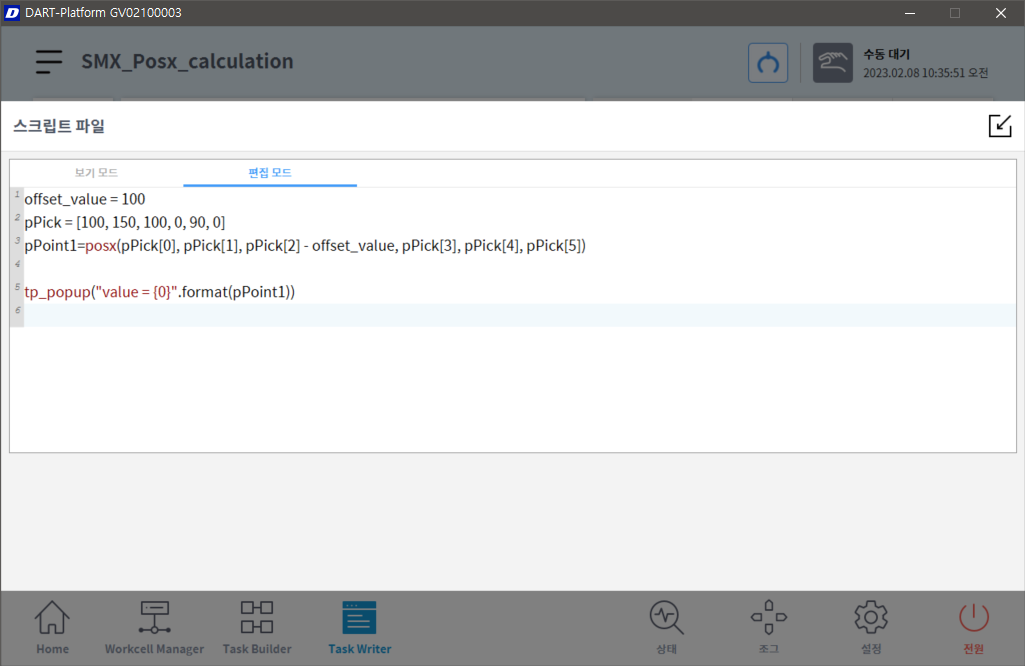
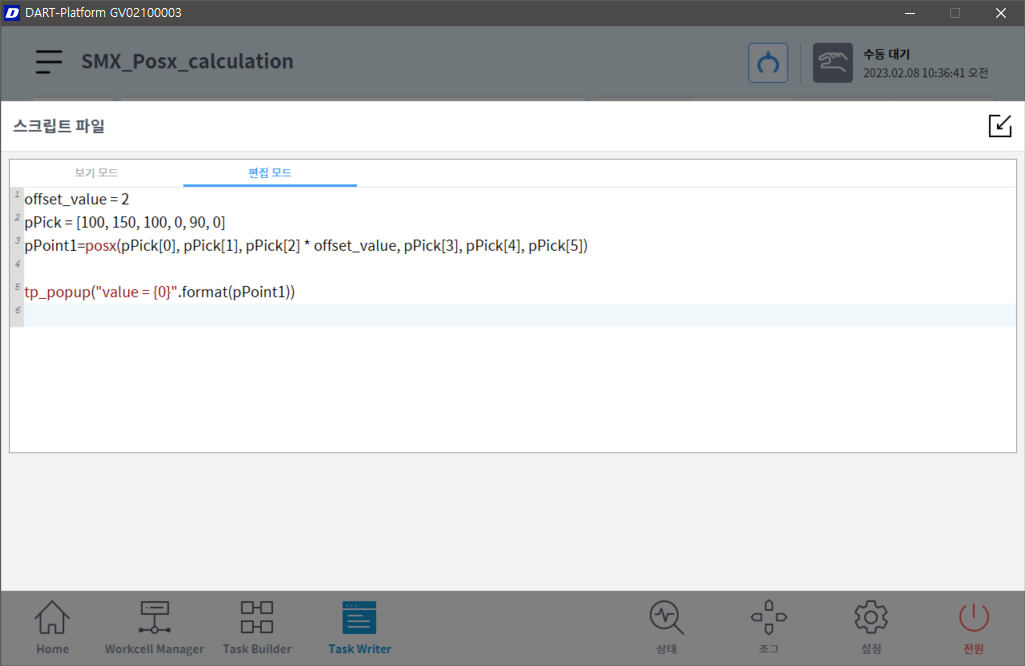
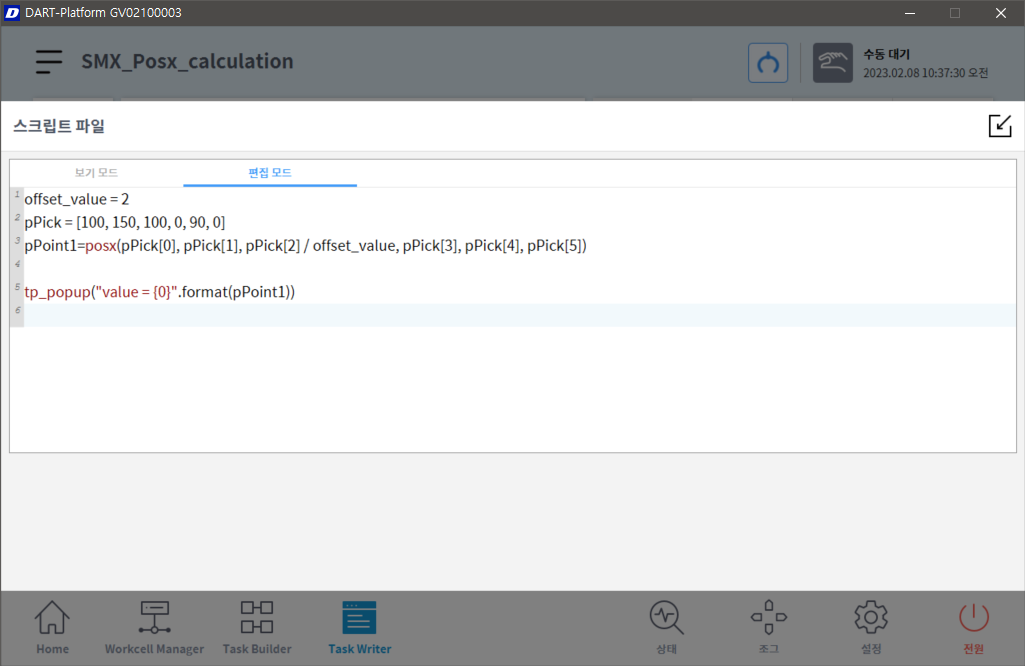
DRL(DoosanRobotLanguage)でコーディングをしたい場合は、"CustomCode"アイコンをクリック
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
offset_value=get_input_register_int(0)
appro1 = [0, 0, offset_value, 0, 0, 0]
System_Appro = trans(System_pPick, appro1, DR_BASE,DR_BASE)
movel (System_home, vel=150, acc=30)
movel (System_Appro, vel=150, acc=30, radius=100)
movel (System_pPick,vel=150, acc=30, app_type=DR_MV_APP_WELD)
set_output_register_bit(0, ON)
wait(1)
set_output_register_bit(0, OFF)
movel (System_Appro, vel=150, acc=30, radius=100)
movel (System_home, vel=150, acc=30)
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
![]()
![]()
