協働ロボットは、作業者と同じ空間で柵なしで使用できるロボットです。そのため、作業者、ロボット、および作業スペースの安全性に関連する機能は非常に重要です。
Doosanロボットは安全関連の電気的インターフェースに加えて、ソフトウェアを使用してロボットの作業スペースを設定し、必要に応じて安全機能を最大化すると同時に、作業を効率的に構成できます。また、ロボットの使用中に問題が発生した場合にロボットを操作できるトラブルシューティングモードも提供します。
このコースでは、作業スペースの設定やトラブルシューティングモードなど、Doosanロボットの安全関連機能を紹介します。
※安全関連機能に関する注意事項
ロボットの安全関連機能およびインターフェースを使用するワークセルは、ロボットの用途に応じてシステムインテグレータが実施するリスクアセスメントに従って設定してください。その際に必要な情報は、Doosan Roboticsの導入マニュアル/ユーザーマニュアルを十分に理解し、参照してください。
ロボットの安全システムがシステム異常(非常停止回路の断線)、位置センサーの破損、制御目的通信の故障などのハード異常を検出した場合、直ちに停止カテゴリ0が開始されます。安全監視実行中(非常停止スイッチ押下時)、保護停止信号入力時、外部衝撃検出時、ロボットの位置・速度・運動量などの物理パラメータが設定値を超えた場合、安全設定メニューで指定した停止モードに従ってロボットを停止させます。(停止カテゴリ0、1、2より選択)。
Doosanロボットは、5種類の作業スペース設定機能を備えており、作業効率の向上だけでなく、作業者の安全を優先するために使用することができます。
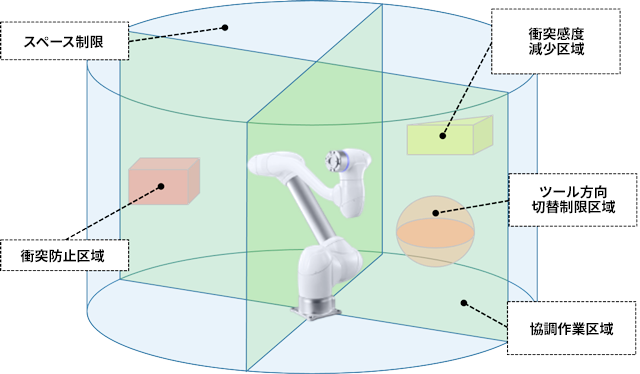
作業スペースの種類と設定方法は以下の通りです。 [Workcellmanager]の最下段の+ボタンをおすと、作業スペースを選択できる画面が表示されます。
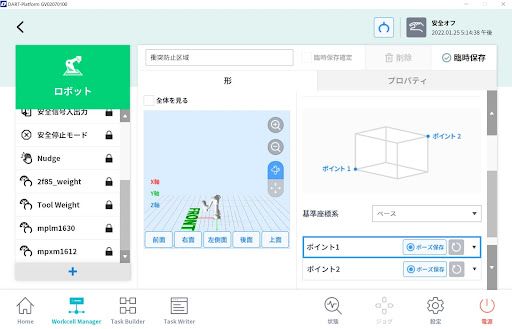
ロボットが動作する作業空間では、ダイレクトティーチングでロボットを教示する場合、ロボットが作業空間の境界線に到達すると反発力が発生します。ジョグやロボット自動運転中にロボットが作業空間から外れると、メインメニューで設定した安全設定に従ってロボットが停止します。

【やってみよう】
[スペース制限] で、形状の種類を円柱にし、上面のポイントを800mm、下面のポイントを0mm、X,Y軸の半径の距離を共に300mm、原点を0,0と入力します。そして、設定された作業空間と、この作業空間でダイレクトティーチングしているときに発生する安全停止を確認します。
ロボットと作業者が同時に作業できる作業空間で、作業時に発生する反力や速度などを低減するための減速条件を設定することができます。

【やってみよう】
協調作業区域では、ロボットのBASE座標系のXZ平面に近い2点を用いてPlane1を定義し、Y+方向に選択点を指定します。そして、ロボット動作中に減速が発生するかどうかを確認します。
設定された区域に侵入した場合、ロボットは安全規格停止モード設定に従って停止します。
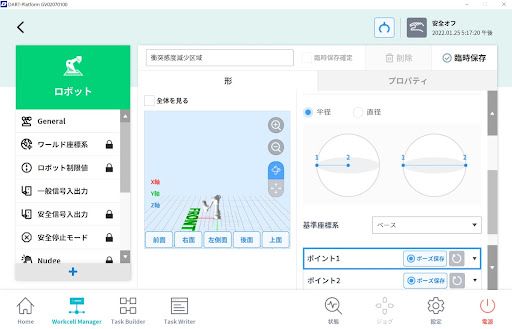
衝突感度減少区域として設定されている場合、任意の衝突検出感度を設定することができます。
【やってみよう】
[衝突感度減少区域]で、形状の種類を球に設定し、半径条件を選択して、球面の位置と中心点をそれぞれ入力します。次に、設定した区域で任意の衝突検出感度を設定して、ロボットの動作中に該当範囲において衝突検出感度が変更されているか確認します。
ツール中心点(TCP)がツール方向切替制限区域を出ると、メインメニューの設定で設定された安全設定に従ってロボットが停止します。

Doosanロボットは、ロボットの動作中に発生した問題に対して、リカバリーモードと無重力動作モードで対処します。

【やってみよう】
ロボットがサーボオフ状態のときに安全回復機能に入ります。次に、右上隅のサーボオンボタンを押し、ジョイントジョグを使用してロボットを目的の位置に変更します。

このコースでは、Doosanロボットが提供する安全関連の機能を紹介しました。作業スペースの設定は、操作、協調作業、衝突感知の閾値の減少などの機能を利用できるスペースを設定できます。トラブルシューティングモードは、ロボットが正常に動作しない問題発生時に使用できる機能です。詳細については、導入マニュアル/ユーザーマニュアルを参照してください。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
