1. はじめに
協働ロボットを使用した自動化には、基本設定と機能の理解に加えて、ロボットの動作を設定する必要があります。この作業をロボットプログラミングまたはタスクプログラミングと呼び、Doosan Roboticsはプログラミングのために2つの方法を提供します。
- Task Builder:ロボットとその周辺機器の操作に関する「アイコン」ベースの「スキル」を備えた、直感的で簡単なプログラミング環境を提供します。
- Task Writer:ロボットの操作に関連するさまざまなコマンドを提供し、高度な/多様なタスクプログラミングを可能にします。
このコースでは、Doosan Roboticsが提供する「Workcell Manager」と「Task Builder」を使用してプログラミングする方法を学習します
「Workcell Manager」は、周辺機器のセットアップメニューの一種です。ここでは、Doosanロボットの接続をセットアップするためのアプリ(スマートセットアップ、安全設定など)だけでなく、ロボットの自動化に不可欠なエンドエフェクタ、作業機械、および周辺機器を追加できます。 「Task Builder」は、「スキル」と呼ばれるDoosan Roboticsが提供する独自のアイコンベースのコマンドでロボットタスクをプログラムできます。 「Move J」や「Move L」などの基本的なロボット操作スキルに加えて、「Workcell Manager」で設定された周辺機器に応じて事前定義されたスキルを使用してタスクを簡単にプログラムできます。
2. Workcell Manager
一般に、ロボットと周辺機器の連動は、デジタルまたはアナログ信号または産業用通信によって行うことができます。ただし、連動させるには、ロボットが提供する信号や関連コマンドのプログラミング方法を習得する必要があります。 「Workcell Manager」は、この学習の難易度を軽減するためにスマートフォンのようなユーザーインターフェースを提供します。そのため、周辺機器との通信に必要なコマンドを事前に確認しなくても、「Workcell Manager」の設定画面から簡単にロボットと周辺機器を接続するアプリを追加できます。
2.1 「Workcell Manager」のメイン画面
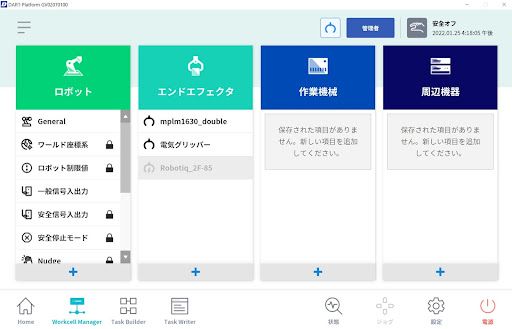
- ロボット:設置ポーズ、ツール重量、作業スペース、衝突感度減少区域などの環境設定項目を追加できます。
- エンドエフェクタ:グリッパー、スクリュードライバーなど、その他多くのツールを追加できます。
- 作業機械:プレス機、ターニングセンター、射出成形機など、様々な工作機械を追加できます。
- 周辺機器:パレットパターン、フィーダー、コンベア、溶接機などの機器を接続できます。
- 「追加」ボタン:各項目に選択可能な項目を追加します。
※非アクティブ化されたワークセルアイテムは、アイコンをクリックして左上のトグルボタンを使用することでアクティブ化/非アクティブ化できます。複数のアイテムを追加して、必要なアイテムをアクティブ化して選択できます
2.2 エンドエフェクタの設定
エンドエフェクタのセットアップは2つの部分から構成されています。 1つ目は、ロボットとエンドエフェクタの通信タブです。 2つ目は、ツール中心位置タブです。
[通信] タブで、デジタル信号またはModbus-TCPを使用してロボットをエンドエフェクタに接続するために必要な信号または通信設定を入力します。

- エンドエフェクタには、空気圧、真空、電気グリッパー、ドライバーなど様々なツールが登録可能です。
- I/O信号を設定します。
- ツール中心位置 (TCP) を設定します。
- 出力ポートを選択し、出力信号をテストすることができます。
- 出力信号ポートを選択し、入力信号の状態を確認できます。正常な状態を示す緑色が表示されます。
[ツール中心位置] タブは、ユーザーがインストールしたエンドエフェクタの基準点(中心位置)を定義します。これは、ロボットのフランジの中心点ではありません。

ツール中心位置を設定するときは、フランジ座標系に対する位置とともに回転角を定義する必要があります。
以下の手順に従って、ツール中心位置を設定してください。
- フランジ基準原点からTCPまでの各方向の距離を500mm以上に設定することはできません。回転角A、B、Cはユーザーが入力する必要があります。
- 対称ダブルグリッパーの場合は、すでに設定されているもう一方のエンドエフェクターを基準にTCPの位置を設定します。ツールのZ軸を中心とした入力角度で、基準エンドエフェクタのツール座標系のTCP位置と姿勢を回転させることにより、新しいエンドエフェクタのTCP位置を簡単に設定できます。
例)
- 使用するエンドエフェクターを追加します。
A. 標準の空気圧、電気、真空グリッパーのほとんどは、基本的なアプリで利用できます。
B. Doosan Mateに登録されている特定のパートナーの製品を使用する場合は、ホーム画面の右下にある設定メニューの [ロボットの更新] をクリックし、[ワークセルとスキル] アイテムの [インストール] ボタンをクリックして、グリッパーのアプリを追加しますインストールファイル (* .dr3)を探しインストールしてください。 - その後、エンドエフェクタメニューの追加ボタンを押して、入出力信号やツール中心位置などを設定し、動作テストを行います。
※エンドエフェクタの設定方法、入出力信号、ツール中心位置の詳細な設定方法は、リファレンスマニュアル/ユーザーマニュアルを参照してください。
2.3 作業機械のセットアップ

- Workcell Managerに登録できるワークマシンの種類は以下のとおりです。
- ターニングセンター:円筒形のワークピースを回転させながらタレットツールで入力形状を切断するための装置
- マシニングセンター
- プレスマシン:平らな材料を希望の形状にプレスする装置
- 射出機:プラスチックやその他の材料を金型に射出する装置
- エンドエフェクタと同様に出力/入力信号を設定します。
- チェック用動作試験
※各マシンタイプ、タスク項目の詳細については、リファレンスマニュアル/ユーザーマニュアルを参照してください。
2.4 周辺機器のセットアップ
周辺機器は、ロボット、エンドエフェクタ、または作業機械として分類されませんが、ロボットと相互作用するワークセルアイテムです。
「Workcell Manager」に登録できる周辺機器は以下のとおりです。
- エンコーダ:デジタル回路で、あるコードシーケンスの信号を別のコードシーケンスの信号に変換するコンバータ。通常、コンベア追跡アプリケーションで必要です
- フィーダー:シューティングボルトまたはピックアップボルトフィーダー。ネジを組み立てる際のボルト供給装置、および物体を配置するための様々なパレット。
- ビジョン:画像情報を介してオブジェクトの位置を修正するデバイス。
- 溶接

例)
- パレットの行と列を入力します。
- パレットパターンを設定します。ロボットTCPを右側のパターンガイドの1の位置に移動します。
- ポイント1の保存位置に対応する位置座標値を入力します。ロボットTCPをパターンガイドの2と3の位置に移動し、それぞれ保存します。
※ワークセルアイテムのガイド絵に従って、反時計回りに3つの位置をティーチングすると、積み重ねられたもの、または積層されたものをピックアップしてパレット上下方向へ移動する位置のオフセット方向を自動計算することができますのでお勧めです。
3. Task Builder
Task Builderは、登録された作業環境と周辺情報に基づいて、自動推奨のアイコンベースのスキルとタスクテンプレートを使用できる使いやすいプログラミングツールです。
スキル、コマンド、およびテンプレートの詳細なリストは、別冊の リファレンスマニュアル にあります。
3.1 タスクを作成する
タスクビルダーの第一画面で、「新規」タブをクリックし、関連するワークセル項目を選択して、「次へ」をクリックします。タスクリストは以下のように作成されます。

- タスクの種類は以下の通りです。
- 新規:新しいタスクを作成し、タスク名を保存します。
- テンプレート:登録されたワークセルアイテムの組み合わせとして使用できるスキルのアイコンで、作業プロセスを気にする必要がなく、すでに構成されているスキルの値を設定してタスクを簡単に作成できます。
- 保存されたファイル:以前に保存されたファイルを読み込むことができます。
- インポート:保存したタスクファイルを外部ストレージデバイスにインポートできます。 (以下の機能は、ソフトウェアバージョンがM2.4.0以降の場合にのみサポートされます。)
- ワークセルアイテム選択:「Workcell Manager」で設定したワークセルアイテムをカテゴリ別に選択できます。
- 選択されたワークセルアイテムリスト:タスク用に作成するリストアイテムの現在の状態を表示します。保存したファイルを読み込むことができます。
※保存されたタスクファイルの拡張子は「.tb」です。
3.2 コマンドの設定
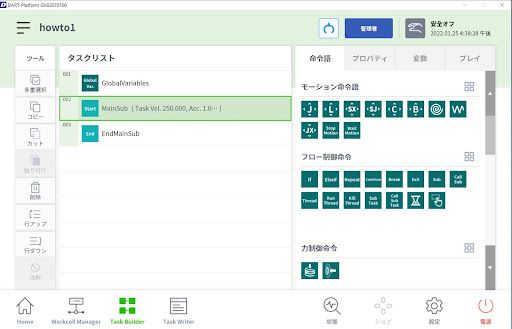
- ツール:コピーや貼り付けなどの作業が行えます。
- タスクリスト:[命令語] タブで追加されたコマンドリストを表示します。
- GlobalVariables:[プロパティ] タブで、タスクプログラムの変数とポーズを入力できます。入力されたグローバル変数とグローバルポーズは、タスクリストに追加されたコマンドのプロパティ画面で利用できます。
- MainSub:選択したコマンドがMainSubの下部に追加され、順番に実行されます。ここでは、グローバル速度と加速度を設定できます。
各命令後 & スキル:モーション、フロー、力制御(フォースコントロール)コマンドに加えて、選択したワークセルアイテムコマンド(グリッパー、ビジョンなど)のコマンドを選択できます。
プロパティ:各モーションコマンドの個別のプロパティ値を設定できます。GlobalVariablesで設定した変数やポーズなどを使用できます。
3.3 プレイ

- 右上の「プレイ」タブを選択します。画面の変更が完了すると、ティーチペンダントとフランジのLEDが青から白に変わります。
- 実際のモードのトグルボタンを無効にすると、バーチャルモードに変更されます(シミュレーション)。
- 「実際のモード」での実行では、作成したプログラムを実際にロボットで動かして結果を確認できます。
- 「デバッグ」にチェックを入れると、ブレーキ地点やスキップ地点を定めてデバッグ動作確認を行うことができます。
4. まとめ
このレッスンでは、Doosan Roboticsの「Workcell Manager」と「Task Builder」の使い方を学びました。「Workcell Manager」は、エンドエフェクタ、作業機械、周辺機器のインターフェースを設定するための周辺機器設定メニューです。また、「Task Builder」は、「Workcell Manager」で事前にプログラムされた周辺機器をサポートする様々なスキルを使用して、作業プログラムをすばやく簡単に完成させることができます。
5. 参考資料
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
