Doosanロボットは、物体の位置を映像情報を通じて測定し、ロボットの作業指令と連動できるビジョンシステム、スマートビジョンモジュール (Smart Vision Module) を提供しています。ロボットの先端に装着されたカメラを利用し、抽出した特徴をもとに物体検出や特徴マップに応じて分類し、認知した物の位置を追跡して高レベルの作業ができるようになります。

Doosanロボットが提供するスマートビジョンモジュールは、本体、電源&LANケーブル、DCジャックで構成されています。ビジョンの取り付けと電源、通信の接続方法について学びましょう。

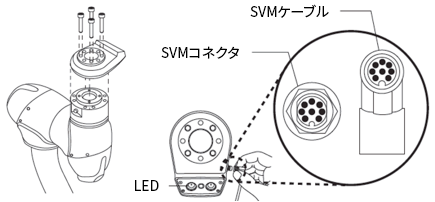
M6六角ソケットボルトを4本用意し、ボルトを9Nmで締め付けます。次に、SVM本体コネクタに内蔵ケーブルを接続します。ボルト、ピン、レンチなどは付属しておりません。
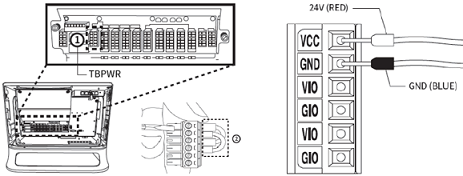
コントローラーの電源を切った後、電源用端子ブロック (TBPWR) に従来接続されているケーブルを外します。 24 V電線はVCCに、GND電線はGNDに接続した後、電線を固定し電源用端子ブロックに接続します。
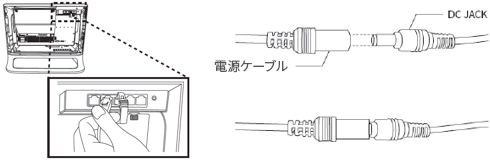
コントローラーの右上のLANポートにケーブルを接続します。 WANポートに接続しないように注意してください。コントローラに接続したDCジャックをSVM本体の電源ケーブルに接続します。
Workcell Manager、周辺機器でSmart Vision Moduleを選択します。デフォルトでスマートビジョンモジュールアプリがインストールされているため、簡単に設定できます。
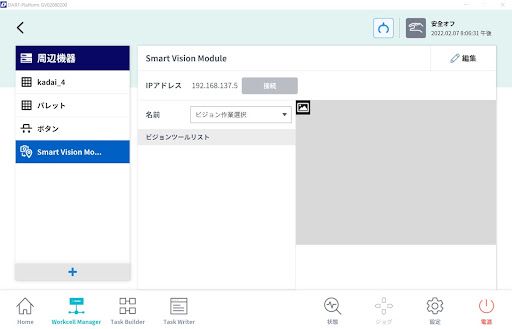
「カメラ接続」タブで確認できます。カメラのIPアドレスは固定IPでデフォルト (192.168.137.5) に設定され、接続に成功するとConnectボタンは無効になります。

※スマートビジョンモジュールとティーチペンダントが接続されている状態で物理的にケーブルを抜く場合、それぞれの電源を再起動する必要があります。
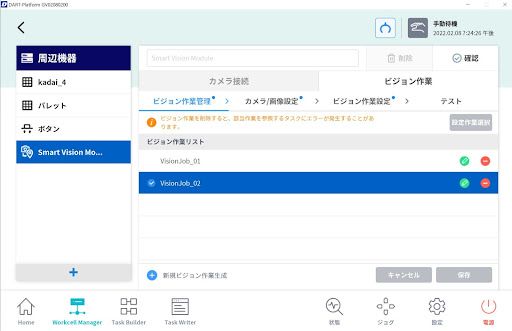
「ビジョン作業」タブをタップして、「ビジョン作業管理」の「+新規ビジョン作業作成」でジョブを作成します。既存のジョブが存在しない場合は、「Visionjob_01」で名前が生成され、既存のジョブがある場合は、作成されたジョブの最後の番号を確認して新しいジョブ名を割り当てます。
作業テーブルとカメラの視野が水平に見えるようにロボットを移動させます。
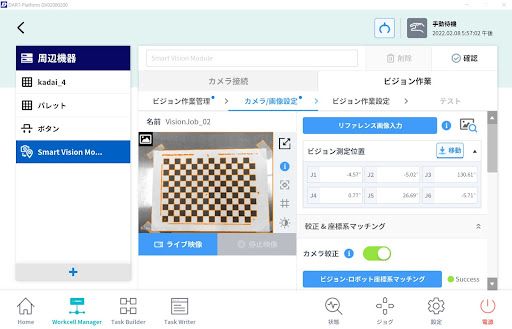
キャリブレーションは、開始前に測定ツール(キャリブレーション治具)がフランジに取り付けられ、TCP情報がそれに合わせて変更されている必要があります。

※キャリブレーションボードは技術資料からダウンロード可能です。 A4規格の用紙に合わせて印刷し、紙に書かれている210 mm x 135 mmが正しく表示されていることを確認して使用してください。
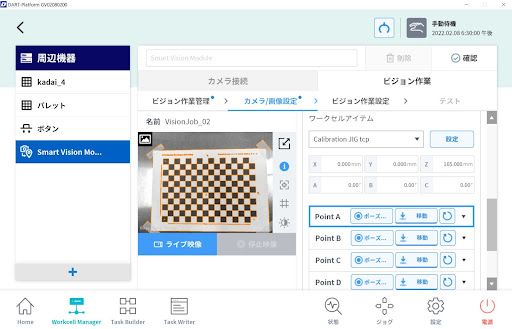







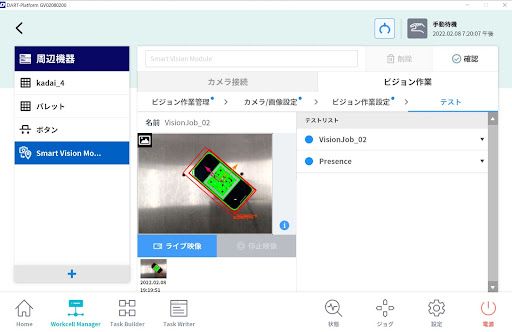
ライブ映像を押してリアルタイム映像表示後、停止映像で画像検出します。
このコースでは、Doosanロボットが提供するスマートビジョンモジュールのハードウェア接続と基本設定について学びました。物体外形の自動認識により、物体の位置が変わってもXY平面移動およびZ軸回転を自動的に計算し、スマートビジョンモジュールを利用したPick & Placeなど多様な作業が可能です。より詳細な使用方法は、リファレンスマニュアルで確認できます。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
