Doosanロボットには、設置角度、ツール重量、
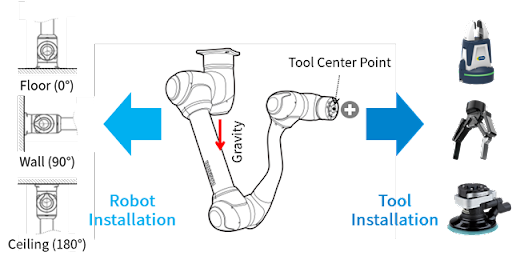
ツール中心点の位置を自動的に計測するスマートセットアップが装備されているため、ロボットの設置や変更をすばやく簡単に行うことができます。
各軸に取り付けられたジョイントトルクセンサー (Joint Torque Sensor = JTS) に基づいて、業界最高レベルの衝突感度を実現した制御機能で、設置取り付け角度やツール重量を計測することができます。
また、ロボット先端に取り付けられたツールの位置を効率よく操作するために不可欠であるツール座標系を指定するために、ツール中心位置 (TCP) を4つの位置からティーチングして自動計算します。
Doosanロボットはどの角度でも設置できます。したがって、直接制御やコンプライアンス/力制御など、設置角度に合わせた高度な制御機能を使用するには、ロボットの設置角度を正確に入力する必要があります。
Workcell Managerのロボットカテゴリの最下段+ボタンを押してロボットのMountを選択します。

ロボット設置ポーズ画面の自動計算ボタンで、ロボット設置角度を自動計測することができます。測定された角度はY軸とZ軸に変換され、自動的に入力されます。

※自動計算に関する注意事項は以下のとおりです。
自動計算中は、自動計算ボタンが停止ボタンに変わります。このボタンを押すと停止します。

※自動測定機能を停止して再計測した場合、ロボットは初期起動ポーズから動作しますので、ユーザーやロボットの安全にご注意ください。
【やってみよう】
ロボットを任意の場所に設置し、ロボット設置ポーズの自動測定で設置角度を測定します。
直接制御やコンプライアンス/力制御などの高度な制御機能を有効に活用するには、ロボットで使用するツール重量/重心を正確に入力する必要があります。
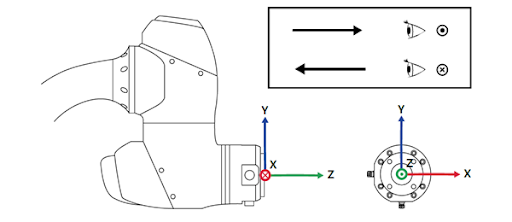
DoosanロボットのデフォルトのTCPの位置については、次の図を参照してください。
Doosanロボットは、ロボットのツールフランジに取り付けられたツールの重量を自動的に測定するツール重量測定機能を備えています。
Workcell Managerのロボットカテゴリ最下段+ボタンを押して、ロボットのtoolweightを選択します。
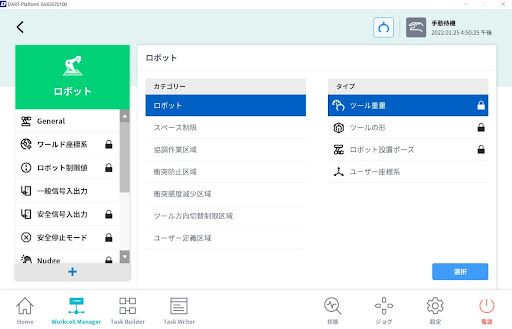
ツール重量設定画面の自動計算ボタンで簡単にツール重量を測定することができます。

※自動計算に関する注意事項は以下のとおりです。
自動計算中は、自動計算ボタンが停止ボタンに切り替わります。このボタンを押すと停止し、このとき、重量/重心の値が初期化されます。

※自動測定機能を停止して再測定した場合、ロボットは初期起動時のポーズから動作しますので、ユーザーやロボットの安全にご注意ください。
【やってみよう】
ロボットのツールフランジに使用するツール(グリッパー、電動工具など)を取り付け、ツール重量の自動測定で重量を測定します。
ロボット先端に取り付けられたツールの位置を効果的に操作するには、TCPを正確に入力する必要があります。 TCPは、フランジ座標系に基づいて位置と回転角度とともに定義する必要があります。
Workcell Managerにエンドエフェクタとして登録されているWorkcell Itemから [ツールセンターポジション] のタブを選択します。

自動計算のスイッチを押します。

次に、ツールの中心点に位置を設定し、基準位置を設定し、[ポーズ保存] ボタンを使用して4つの位置を入力し、ツールの中心点が一定に保たれるようにします。4つのポジションを入力する手順については、下の図を参照してください。

保存するたびに、位置に関する詳細な座標情報を表示できます。

4つの位置を入力し、自動計算ボタンをタップすると、上部の位置情報領域で値が更新されます。

【やってみよう】
ロボットのツールフランジに使用するツール(グリッパー、電動工具など)を取り付け、TCP自動計算機能を使用してそのツールのTCPを計算し、TCPベースでダイレクトティーチングまたはジョグでツールを操作します。
このコースでは、Doosanロボットが提供する、ロボットの設置姿勢、重心、ツール中心位置を簡単に設定できるスマートセットアップ自動機能を紹介しました。ロボットの位置やツール重量は現場で直接測定することも可能ですが、スマートセットアップを利用すると、自動化システムをすばやく簡単に構成できます。詳細については、ユーザーマニュアルを参照してください。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
