Pick & Placeは、ロボットを使用する際によく使われる作業の1つです。パレットにワークを積載する工程、コンベアベルトで対象物が目標点に到達したときに移動させる作業、ギア組立、ホール探索などにも使用できます。

Pickスキルは、決められた位置に移動して対象物に接近、接触したとき、グリッパーを作動して対象物を把持するスキルです。Pickスキルの動作としては、位置制御のみを活用した動作、位置制御とコンプライアンス制御(順応制御)機能を活用した動作、位置制御とコンプライアンス制御(順応制御)機能および接触感知機能を活用した動作などの3つのパターンがあります。Placeスキルは、決められた位置に移動し、グリッパーを作動して対象物を置くスキルです。Pickスキルと同様に、3つのパターンの動作があります。
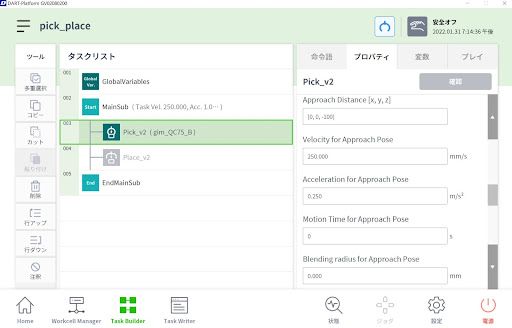
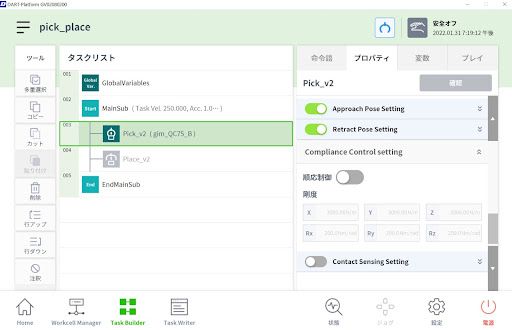
PickとPlaceは実際のツールが作動する作業点 (action pose) から垂直方向に進入点 (approach pose) を持つスキルです。その後、対象物をつかんで別の位置に行くための後退点 (Retract Pose) に移動します。通常、作業点基準ツール座標系 - Z方向(対象物から離れる方向)であり、入力された後退距離 (retract distance) で自動的に計算され、その位置に移動します
Work Managerの最初の画面で、エンドエフェクタメニューからグリッパー(GripperDAで電気グリッパーを使用)を追加します。エンドエフェクタポートをロボットフランジまたはコントローラーボックスに接続し、出力信号からコントローラー、フランジのいずれかを選択します。入出力信号の種類をそれぞれ選択し、入出力ポート番号を選択します。

※入力信号の場合、信号が正常に入力されると緑色が点灯します
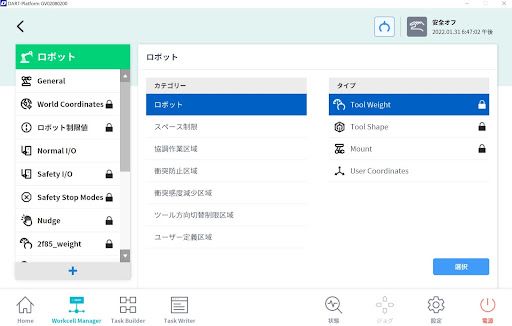
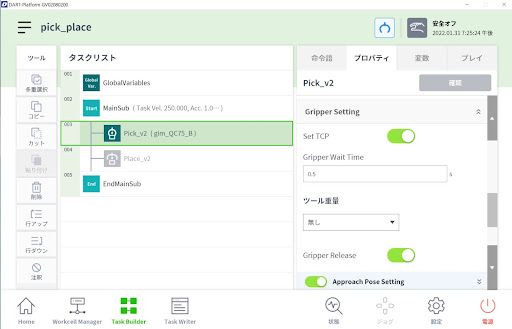
ロボットは、作業を開始するためには、現在装着されているツールの重さとツール中心位置 (TCP) を設定をしなければなりません。
ポイント1~4ポーズ保存後、自動計算を押すと自動的にツール中心位置が設定されます。エンドエフェクタースキルコマンドを使用して、TCPオフセットを自動的に変更設定できます。

Work Managerのホーム画面、ロボットメニューからグリッパーの重さと中心を設定できます。自動計算を使用して測定したり、直接入力することもできます。

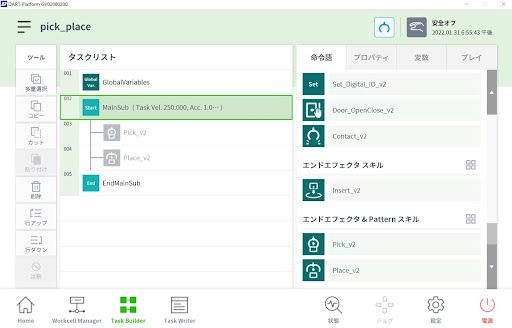
エンドエフェクタスキルからPickとPlaceスキルを選択してプログラミングを行います。

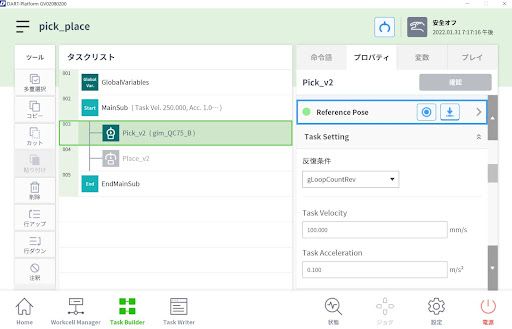
※PickとPlaceの各動作に対して詳細速度の指定および相対座標の設定が必要な場合は、Reference Poseの右側にある拡張ボタンを押してください。
上記の他にも高度なオプションを設定することができます。接近/後退設定、速度/加速度以外のコンプライアンス制御、接種検出設定を行うことができます。


【やってみよう】

今回のコースでは、DoosanロボットのTask Buliderを利用して、Pick & Placeの使い方を学びました。ワークセルアイテムの設定やエンドエフェクタスキルの属性値、高度なオプションを理解すれば、様々なタスクを簡単にプログラミングできます。詳細については、リファレンスマニュアル/プログラミングマニュアルを参照してください。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
