Doosanロボットが提供するモーションコマンドは、ベーシックモーションとアドバンスモーションの2種類に分類できます。各タイプのモーションコマンドは次のとおりです。
このコースでは、4種類のベーシックモーションコマンドを紹介します。
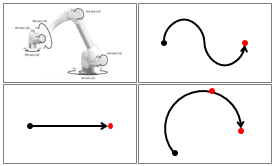
ロボットを駆動するモーションコマンドは、ジョイント動作とタスク動作に分けることができます。モーションコマンドに「J」が含まれている場合、ツールの位置や直線性を考慮せずに、ロボットの各ジョイントが目標点に移動し、ジョイント角度に応じて最終座標に到達する関節運動に分類されます。「J」が含まれていない場合、タスク動作として分類され、ツールの端から直線または円弧状で最終座標に移動します。その結果、様々なジョイント角度を組み合わせることができますが、各ジョイント角度での移動が不可能な場合、特異点エラーが発生する可能性があります。
ここではモーションコマンドを作成するときに共通に設定されるプロパティ値を紹介します。
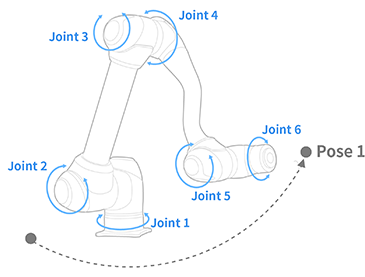
目標ジョイント座標でロボットを移動するために使用されるMove Jの場合、参照座標を設定せずに、各ジョイント角度を指定することにより、ロボットを目的の位置に移動します。

Move L、Move C、Move JX の場合は、基準座標、X、Y、Z軸の位置座標、A、B、C軸の回転角度を設定します。

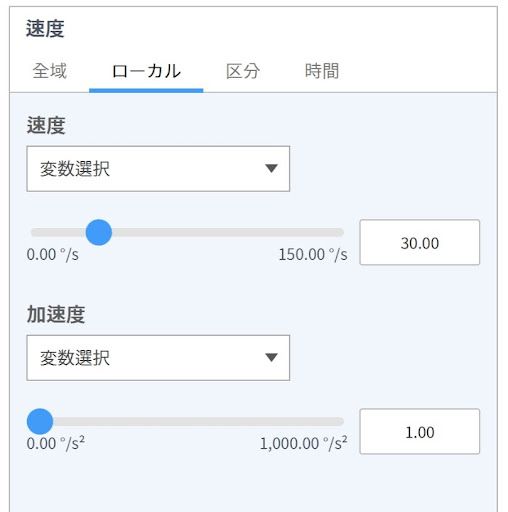
速度と加速度については、タスクリストの一番上にあるMainSubに入力された値がデフォルト値です(モーションコマンドごとに個別の設定がない限り)。 MainSubでは、タスク、ジョイント速度、加速度、特異点処理などを一度に設定できます。ジョイント動作であるMoveJは、各ジョイントの移動速度を設定でき、Move Lのようなタスク動作は、[ローカル] タブで直線移動の速度と加速度、回転速度の速度と加速度がそれぞれ設定でき、到着時間も指定できます。

作動モード 移動中の軸の動作方法によって、同期モードと非同期モードがあります。
同期:モーションコマンドは連続して実行されます。実行中のコマンドが終了すると、次のコマンドが連続して実行されます。
非同期:非連続のモーションコマンドです。モーションコマンドを任意に実行すると、すぐに次のコマンドが実行されます。
半径 半径が0に設定されている場合、ブレンディングモードはアクティブになりません。そのため、ロボットが現在のモーションコマンドの目標点に到達すると、ロボットは停止してから、次のモーションコマンドの目標点に移動します。
ブレンディングモード 特定の条件が満たされると、目標点に到達して停止する代わりに、現在のモーションコマンドの目標点に到達することなく、次の目標点にスムーズに移動する機能があります。
重畳:ロボットがモーションコマンドの目標点を中心に設定された半径に達すると、ロボットは現在のコマンドの速度を維持し、次のモーションコマンドの目標点に移動します。
オーバーライド:ロボットがモーションコマンドの目標点を中心に設定された半径に達すると、ロボットはすぐに現在のコマンドの速度を下げ、次のコマンドの目標点に移動します。
【やってみよう】
基本モーションプロパティで様々な動作条件を設定してから、ロボットを自分で動かしてみてください。各モーションプロパティのMainSub、位置、速度/加速度、および動作モードを変更しながら、ロボットの動きを比較します。
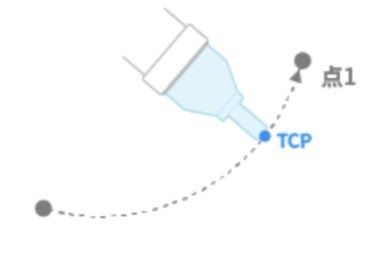
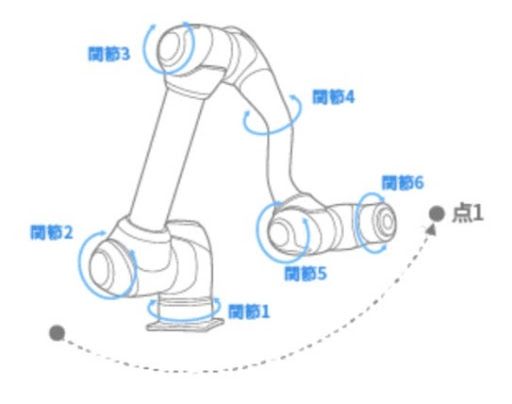
目標位置にジョイント角度を設定してロボットを動かすために使用します。 TCPは特定の経路をたどる必要はなく、他のモーションコマンドに比べて動作が速いのが特徴です。中間の目標点が別途設定されていない場合、終点の位置は重要ではなく、迅速な操作を実行するために移動を高速化したい際によく使用されます。たとえば、コンベアからワークを取り出し、すばやく動かしてパレットにランダムに積み込むような素早い動作に使用するのが効果的です。
【やってみよう】
Move Jを使用して、任意の開始点P0に移動し、以下プログラムを作成します。
速度 (60º/s) と加速度 (60º/s²) を設定し、任意の目標点P1に移動します。また、次に到着時間を5秒に設定し移動します。この2つの動きの目標点P0からP1への移動速度を比較してみて下さい。
速度 (30º/s) と加速度 (30º/s²) を設定し、別の任意の目標点P2に移動します。モーションプロパティでブレンディング半径を100mmに設定し、ブレンディングモードでP1を介してP2に移動してみてください。
ジョイントの動きに影響を与える特性、ジョイントの動き、および移動速度について、より良い理解を得ることができます。
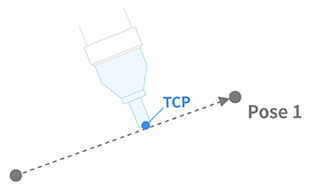
Move Lは、ロボットを直線に沿って目標のワークスペース座標に移動するために使用されます。一般的にTCPはPick&Placeにとって重要です。コンベアからワークを取り出したり、パレットに正確に積み込んだりするような、正確な動作や直線的な動作に便利です。
【やってみよう】
Move Lを使用して任意の開始点P0に移動し、次のプログラムを作成します。
ローカルプロパティで、速度 (250mm/s) を設定し、任意の目標点P1に移動します。
次に他の任意の目標点P2を設定し、非同期モード/オーバーライドモード(ブレンディング半径150mm)でモーションを実行して各モードの特徴を確認してください。
Move Cは、現在の位置から2つのポイント(経由点、目標点)で構成される円弧に沿ってロボットを移動させる際に使用されます。この方法では、2点を基準に円弧を描くため、現在の位置の値が変わると、別の場所に円弧が描かれます。開始点を変更しないように注意してください。
【やってみよう】
任意の開始点P0に移動し、2つのウェイポイント(経由点)(P1、P2)を使用して以下のプログラムを作成します。
速度 (250mm/s) を設定し、円弧軌道に沿ってP1を経由してP2に移動します。
Move JXは、ロボットを目的のワークスペース座標とジョイントフォームに移動するために使用されます。これは直線に沿って移動せず、各ジョイントの動きを規制し、衝突回避を教示する際に使用されます。特異点エラーを解決し、目標のタスク座標に移動するために、アームの肩(右/左)、肘(上/下)、手首(反転無し/反転)を調整します。
【やってみよう】
Move JXを使用して任意の開始ポイントP0に移動し、以下のプログラムを作成します。
速度 (60º/s) と加速度 (120º/s²) を肩、肘、手首の状態とともに設定し、任意の目標点P1に移動します。(例:肩を左、肘を上、手首を反転無し。等)色々なパターンの組み合わせでロボットがどのように動くか確認してみてください。また、その際ロボットの移動範囲が広い場合がありますので、安全にご注意ください。エラーが発生した場合は、条件を変更し動作を試してみてください。
このコースでは、Doosanロボットが提供するベーシックモーションコマンドを紹介しました。ロボット操作の共通設定値とTask BuilderまたはTask Writerで4種類のベーシックモーションコマンドを使用して簡単なプログラミングが可能です。各モーションのプロパティ値の特性をよく理解することが重要です。
※Doosan Roboticsは、本資料に掲載されているすべてのコンテンツおよびデザインについて、著作権および知的財産権を有します。従って、DoosanRoboticsの書面による許可なしに、それらを使用、コピー、または配布することは禁じられています。 Doosan Roboticsの特許権の不適切な使用または変更についての責任はお客様に御座いますのでご注意下さい。
