協働ロボットは、作業者と同じ空間で柵なしで使用できるロボットです。したがって、作業者、ロボット、および作業スペースの安全性に関連する機能は非常に重要です。
Doosanロボットは、6つのジョイントすべてにトルクセンサーを備え、業界最高の衝突感度を提供します。人間の作業者がロボットと一緒に作業するために、衝突検出を含む様々な安全関連機能が組み込まれています。
Doosanロボットは、様々な安全規格の監視機能と電気的インターフェースを使用して、ユーザーとロボット自体を保護します。また、他の機器や追加の安全装置に接続することもできます。各安全規格監視機能およびインターフェースの性能は、ISO13849-1に記載されているカテゴリ3およびパフォーマンスレベルd (PL d) だけでなく、IEC62061に記載されているハードウェアフォールトトレランス1 (HFT) および要求安全度水準レベル2 (SIL 2) にも適合しています。 NRTL(米国)、CE(ヨーロッパ)、KC(韓国)などの安全認証も取得しています。
※安全関連機能に関する注意事項
Doosan Roboticsの安全規格停止機能および停止監視機能は、IEC61800-5-2で定義されている安全機能を使用しています。
ユーザーの安全のために提供される停止機能は次のとおりです。
STO (Safe Torque Off) :停止カテゴリ0に対応するすべての停止モードは、すべてのジョイントモジュールモーターへの電源供給を即座に遮断し、ブレーキがかかると動作が強制的に停止します。ロボットの各ジョイントのブレーキは減速用ではなく、停電などで動作電源が切れたときにロボットを停止状態に保つためのものです。 STOを頻繁に使用すると、ブレーキが摩耗し、減速機の寿命が短くなる可能性があります。したがって、STOの使用がどうしても必要な場合を除いて、代わりにSS1を使用することをお勧めします。
SS1(安全停止1):停止カテゴリー1に対応する停止モードにより、すべてのジョイントを最大減速で停止し、モーターへの電源供給を遮断し、ブレーキをかけて停止します。 STOモードの動作として、ロボットを減速停止させます。また、モーターはパワーダウン状態です。停止機能解除後、サーボオン状態でロボットの運転が可能です。
SS2(安全停止2):停止カテゴリ2に対応する停止モードにより、すべてのジョイントが最大減速で停止し、SOS(安全動作停止)が作動します。
併用する停止監視機能は以下のとおりです。
SOS (Safe Operating Stop) :このモードでは、モーター電源が供給され、ブレーキがかかっていないサーボオン状態を維持し、ロボットの現在位置を保持します。このモードで異常な位置変化が検出されると、ロボットはSTOに切り替わります。
安全停止モード (Safety Stop Modes) は [Workcell Manager] の [安全停止モード (Safety Stop Modes)] で、以下の条件で安全規格停止機能を選択し適用できます。機能定義と停止モードの仕様の詳細については、インストレーションマニュアルを参照してください。

以下にDoosanロボットがサポートする2つの代表的な停止モードについて説明します。
TPの非常停止スイッチを押すか、TBSFTEM端子に接続されている非常停止スイッチを押すと非常停止機能が作動します。

※非常停止時の注意事項
非常停止の場合、デフォルトでSS1(安全停止1)モードが設定されています。
追加の緊急停止ボタンが必要な場合は、リスク評価を実行した後、コントローラーボックスにボタンを取り付けることができます。
緊急停止は、リスクを軽減する手段として使用してはならず、二次的な保護手段として使用する必要があります。
追加の緊急停止ボタンをコントローラーボックスに接続する必要がある場合は、ロボットアプリケーションのリスク評価を通じて接続するかどうかを決定する必要があります。追加の緊急停止ボタンは、IEC60947 55に準拠している必要があります。
【やってみよう】
[Workcell Manager] - [安全停止モード (Safety Stop Modes)] メニューで非常停止カテゴリをそれぞれSTOとSS1に変更し、ロボットの動作中に非常停止ボタンを押して2つのモードの違いを確認します。
TBSFT PR端子に接続されている保護装置が作動すると、保護停止機能が作動します。
Doosanロボットは、リスクアセスメントによるリスク低減策として使用できる安全規格監視機能を備えています。
監視機能は、以下のカテゴリに分類することができます。機能定義と停止モードの仕様の詳細については、導入マニュアルを参照してください。
各監視機能の閾値は、[Workcell Manager] - [ロボット制限値] で設定できます。以下は、ジョイントモニタリングの閾値を設定する例です。

監視機能によるロボットの停止条件は、前述の安全停止モードメニューで設定できます。
【やってみよう】
[Workcell Manager] - [ロボット制限値] メニューで、衝突感知の通常モード値を50と90に変更し、ロボット操作中の衝突検出の感度の違いを確認します。
※安全閾値とは、安全規格監視機能が停止する条件です。停止が完了すると、外部から加えられる位置と力が、設定された安全閾値と異なる場合があります。
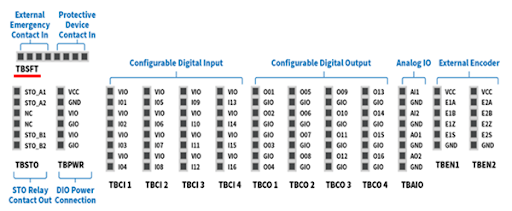
Doosan Roboticsのロボットは、安全保護装置からの保護停止信号、外部緊急停止信号入力、および3ポジションイネーブルスイッチを接続できる安全規格入力インターフェースを備えています。
安全信号の入力/出力は、[Workcell Manager] - [安全信号入出力(Safety I/O)] で設定できます。
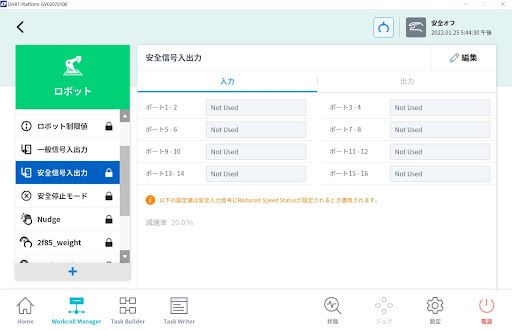
例えば、外部非常停止信号に応じて、ロボットのSS2停止機能を使用したり、ロボットの動作状態を外部機器に伝達したりすることができます。
冗長インターフェースに基づいて入力信号間の不一致が検出された場合、または出力信号のフィードバックで不一致が検出された場合、ロボットは停止し、エラーメッセージが表示されます。ポート1-2と3-4のように組み合わせて定義された機能は、冗長インターフェイスが使用されていることを意味します。
ポートの組み合わせごとに、以下の条件を設定できます。
【安全入力設定】
Emergency Stop (L) :ロボットの装置からEmergency Stop信号を受け取ったり、ロボットの周囲に追加で設置したEmergency Stop Switchを接続する目的で使用します。 High: 正常作動 Low: 安全停止モードで設定したEmergency Stopの安全停止モードに従って停止します。
Emergency Stop - No Loopback (L) :ロボットの装置からEmergency Stop信号を受け取ったり、ロ ボットの周囲に追加で設置したEmergency Stop Switchを接続する目的で使用します。この信号は ‘Emergency Stop - excl. No Loopback Input’ 安全出力を有効化しません。 High: 正常作動 Low: 安全停止モードで設定したEmergency Stopの安全停止モードに従って停止します。
Protective Stop (L) :安全マット、ライトカーテン、レーザースキャナーなどの安全防護装置 (Safeguarding Device)と連動して使うことができ ます。 High: 正常作動 Low: Safety stop modeで設定したProtective Stopの停止モードに従って停止します。
Protective Stop - STO (L) High: 正常作動 Low: 直ちにモーターの電源を遮断してブレーキを作動させ、ロボットを強制的に停止させます。
Protective Stop - SS1 (L): High: 正常作動 Low: 制御停止後、モーターの電源を遮断してブレーキを 作動させます。
Protective Stop – SS2 (L) : High: 正常作動 Low: 制御停止後、Safe
Operating Stop Protective Stop (L) - Auto Reset & Resume (R): Protective Stopとは違い、この信号はInterrupted状態をリ セットし動作を自動的に再開することができます。これはISO TS 15066に説明されている安全適合監視機能による停止後の 自動再始動 (automatic restart after Safety-rated Monitored Stop) を可能にします。 Low: Protective Stop - SS2に従う。 Rising (Low to High): 手動でリセット (reset) または再開 (resume) をすることなく、自動的に作業が再開されます。 直接的な介入をせず、自動的に運転を再開するのは危険です。 この信号を使用することが安全かを確認するために、必ず包括的なリスク評価を行ってください。
Interlock Reset ®: Protective StopによってInterruptedに変更された状態をリセット (reset) するために使用されます。 Rising (Low to High): インターロックをリセット (reset) して正常な待機状態に復帰させます。
Reduced Speed Activation (L) : High: タスクで設定した速度で正常作動 Low: タスクで設定した速度から一定比率で減速して作動します。減速比率はSpeed Reduction Ratioスライドバ ーを調整して設定できます。協調作業区域 (Collaborative Zone) 内で信号が感知されると、ロボットは主な減速比と協調作業区域のうち、小さい方の減速比で(より遅い速度で)作動します。
3 Pos Enable Switch (H): 動作許可装置 - 3の位置のスイッチを接続する際に使用します。機能が設定されると、以下のとおり動作します。 High: 手動モードでのジョグ/サーボオン可能。 自動モードでPlay/Resume/サーボオン可能 Low: 手動モードでジョグ/サーボオンが不可能。 自動モードでPlay/Resume/サーボオン不可能。
Handguiding Enable Switch (H) :動作許可装置 - Handguiding Enable Switchを接続する際に使 用します。機能が設定されると、以下のとおり動作します。 High: ハンドガイディング有効 Low: ハンドガイディング不可
HGC End & Resume (Rising Edge) :自動モードでハンドガイディング命令語を実行時に、タスクプログラムが中止されます。ユーザーがハンドガイディン グ・コントロールを実行後に、タスクプログラム実行を再開 する際に使用する信号です。Rising (Low to High): ハンドガイディング・コントロール (Hand Guiding Control) 遂行後のタスクプログラム実行 の再開
Safety Zone Dynamic Enable (H) :安全スペース制限 (Space Limit)または区域 (Zone) を動的に有効化または無効化させる際に使用可能です。スペース制限、区域設定の際、動的区域の有効化を設定した場合にのみ、この信号を使用することができます。 High: この信号によって一時的に有効化または無効化されたスペース制限/区域を有効化させます。 Low: この信号によって一時的に有効化または無効化されたスペース制限、区域を無効化させます。
Safety Zone Dynamic Enable (L) :安全スペース制限 (Space Limit) または区域 (Zone) を動的に有効化または無効化させる際に使用可能です。スペース制限、区域設定の際、動的区域の有効化を設定した場合にのみ、この信号を使用することができます。 High: この信号によって一時的に有効化または無効化されたスペース制限/区域を無効化させます。 Low: この信号によって一時的に有効化または無効化されたスペース制限、区域を有効化させます。
Remote Control Enable (L): 遠隔制御モード(Remote Control Mode)を有効化するために 使用します。 High: 遠隔制御モード (Remote Control Mode) の有効化 Low: 遠隔制御モード (Remote Control Mode) の無効化
【安全出力設定】
Emergency Stop (L) :ロボット周辺機器に以下のような状況で非常停止が必要であることを知らせるために使用します。 - ロボットアクセサリの非常停止ボタンが押された場合(ティーチペンダント、スマートペンダント、非常停止ボタンボックス)-専用の安全入力端子に非常停止信号が入力された場合 -設定可能な入力端子において、安全入力 (Safety Input) でEmergency Stop (L) 信号が入力された場合 -設定可能な入力端子において、安全入力 (Safety Input) でEmergency Stop - No Loopback (L) 信号が入力された場合 High: 正常作動 Low: 非常停止が必要
Emergency Stop - excl. No Loopback Input (L) :ロボット周辺機器に以下のような状況で非常停止が必要であることを知らせるために使用します。 - ロボットアクセサリの非常停止ボタンが押された場合(ティーチペンダント、スマートペンダント、非常停止ボタンボックス)-設定可能な入力端子において、安全入力 (Safety Input) でEmergency Stop (L) 信号が入力された場合 -設定可能な入力端子において、安全入力 (Safety Input) でEmergency Stop - No Loopback (L) 信号が入力された場合 構成可能な安全入力 (Safety Input) でEmergency Stop - No Loopback (L) である場合は除きます。 この信号を使用すれば、非常停止信号を送って来た周辺装置 に非常停止信号を返さなくなるため、こう着状態 (Deadlock) を避けることができます。 High: 正常作動 Low: 非常停止が必要
Safe Torque Off (L) : High: ロボットがSTO状態ではない Low: ロボットがSTO状態
Safe Operating Stop (L) : High: ロボットがSOS状態ではない Low: ロボットがSOS状態
Abnormal (L) High:ロボットがInterrupted、回復 (Recovery)、自動測定 (Auto Measure) の状態ではない Low:ロボットがInterrupted、回復 (Recovery) 、自動測定 (Auto Measure) の1つ以上の状態
Normal Speed (L) : High: ロボットが外部の減速モード信号入力によって減速作動中 Low: ロボットが正常速度で作動中
Reduced Speed (L) : High: ロボットが正常速度で作動中 Low: ロボットが外部の減速モード信号入力によって減速作動中
Auto Mode (L): High: ロボットの現在の状態が自動モードではない Low: ロボットの現在の状態が自動モード
Manual Mode (L): High: ロボットの現在の状態が手動モードではない Low: ロボットの現在の状態が手動モード
Remote Control Mode (L): High:ロボットの現在の状態は、リモートコントロールモード (Remote Control Mode) ではない Low:ロボットが現在の状態がリモートコントロールモード (Remote Control Mode)
Standalone Zone (L): High: ロボットのTCPが協調作業スペースのうち一つに位置している Low: ロボットのTCPがいかなる協調作業スペースにも位置していない
Collaborative Zone (L) : High: ロボットのTCPがいかなる協調作業スペースにも位置していない Low: ロボットのTCPが協調作業スペースのうち一つに位置している
High Priority Zone (L) : High: ロボットのTCPがどの衝突感度減少区域 (Collision Sensitivity Reduction Zone) にも位置していないユーザー定義エリア (Custom Zone) で高い優先順位区 (High Priority Zone) オプションがチェックされていない Low:ロボットのTCPが衝突感度減少区域 (Collision Sensitivity Reduction Zone) のいずれかに位置しているか、ユーザー定義の区域(Custom Zone) で高い優先順位区 (High Priority Zone) オプションがチェックされている
Tool Orientation Limit Zo ne (L) : High:ロボットのTCPがいかなるツール方向切替制限区域 にも位置していない Low:ロボットのTCPがツール方向切替制限区域のうち一 つに位置している
Designated Zone (L): TCP (Tool Center Position) がユーザー定義の区域内に位置することを確認するために使用します。 Safety Output設定画面で定義された指定区域 (Designated Zone) 信号 は、Zoneの設定画面で選択可能です。 High:TCPが指定区域 (Designated Zone) 安全出力 (Safety Output) に関するいくつかの区域内にも属していない場合 Low:TCPが指定区域 (Designated Zone) 安全出力 (Safety Output) に関する区域内にある場合
【やってみよう】
外部非常停止ボタンを用意し、ポート1-2に接続し、ロボット運転中に非常停止モードが発生することを確認してください。非常停止モードで外部非常停止ボタンを使用する場合、Highは通常の状態、Lowは非常停止状態です。
このコースでは、Doosanロボットが提供する安全関連の機能を紹介しました。安全定規格の停止および監視機能に応じて、さまざまな停止モードを構成できます。安全入出力信号が外部システムに接続されている場合、ロボットのステータスを変更または監視できます。詳細については、導入マニュアル/ユーザーマニュアルを参照してください。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
