このコースでは、Doosanロボットの設置、起動方法について学習します。
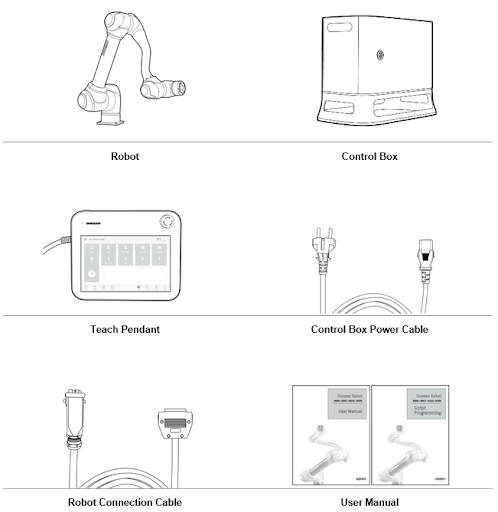
Doosanロボットを購入すると、ロボットシステムは2つの箱に入って納入されます。最初の大きな箱にはロボットアームが、2番目の小さな箱にはコントローラーとティーチペンダントが入っています。安全にお届けするために、すべての製品は保護材で包まれていますので、慎重に取り外してください。

Doosanロボットを使用する際に不可欠な6つの部品が、お届けする2つの箱の中に含まれています。各同梱品の詳細な仕様については、導入マニュアルを参照してください。
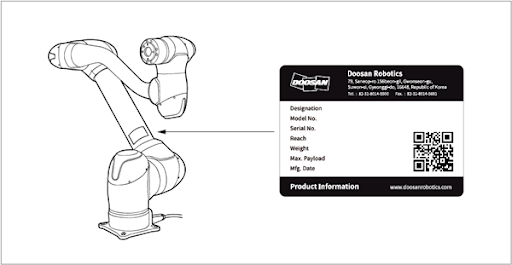
ロボットアームとコントローラーの情報を確認するためのラベルは、以下の場所にあります。

※ロボットアームのベースを固定し、ツールフランジへツールを取り付けるには、別途以下の部品が必要です。
Doosanロボットを設置する際は、以下の手順をお勧めします。
※Doosanロボットの設置に関する注意事項は以下の通りです。よくお読みになってから作業をお進めください。
ロボットシステムを設置するには、ロボットアーム、コントローラー、ティーチペンダントを作業領域に配置し、電源を接続する必要があります。
ロボットを設置する前に、移動に十分なスペースを確保し、設置の際には、以下の点に注意してください。
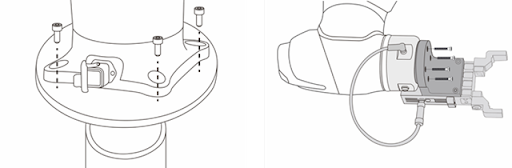
ロボットベースの9.5mmの穴4箇所にM8ボルトを固定して、ロボットを固定します。

コントローラーボックスを床に設置するときは、コントローラーボックス内の換気のため、左右に50mm程度の隙間を設けてください。
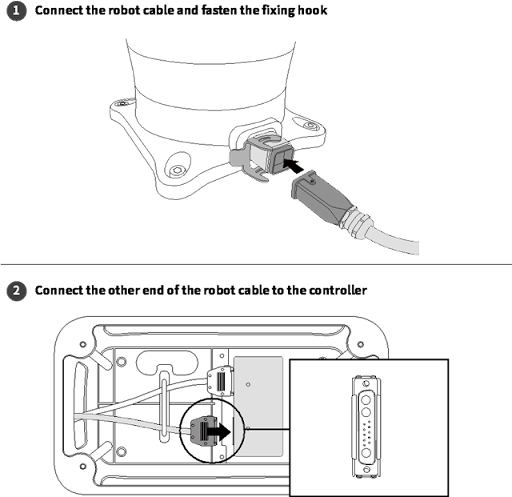
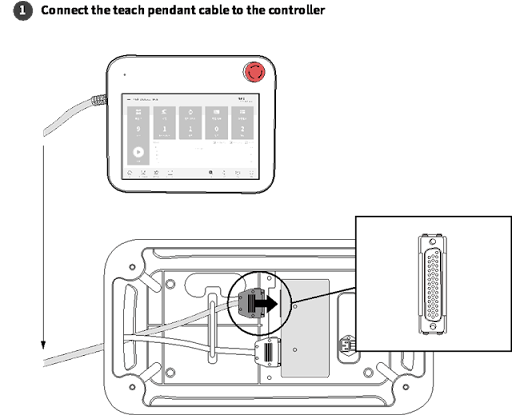
ロボットのケーブルをコントローラーボックスの対応する端子に接続し、固定フックを締めてケーブルを固定します。ロボットケーブルのもう一方の端を、カチッと音がするまでコントローラーボックスの対応する端子に接続し、ケーブルが外れないようにします。
※コントローラーボックスが電磁ノイズの影響を受ける場合、または他の機器に影響を与える場合は、システムの正常な動作のためにフェライトコアを取り付ける必要があります。フェライトコアは以下の場所に設置する必要があります。

ティーチペンダントのケーブルをコントローラーボックスの対応する端子にカチッと音がするまで接続し、ケーブルが外れないようにします。
※ティーチペンダントが電磁ノイズの影響を受けたり、他の機器に影響を及ぼしたりする場合は、システムの正常な動作のためにフェライトコアを取り付ける必要があります。適切な場所は、導入マニュアルに記載されています。
ロボットをコントローラーボックスに接続するには、ロボットの電源ケーブルを標準のIEC電源プラグに接続します。

コントローラーボックスの電気的仕様は次のとおりです。これらの仕様を満たす電源に接続する必要があります。
4本のM6ボルトを使用して、目的のツールをツールフランジに固定します。
ツールを固定した後、必要なケーブルをツールのI/Oまたはイーサネットポートに接続します。
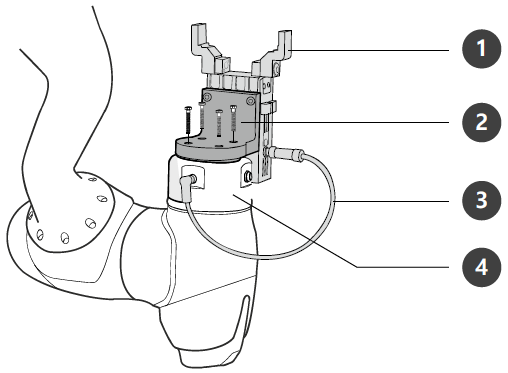
1.ツール、2.ブラケット、3.ツールのケーブル、4.ツールフランジ
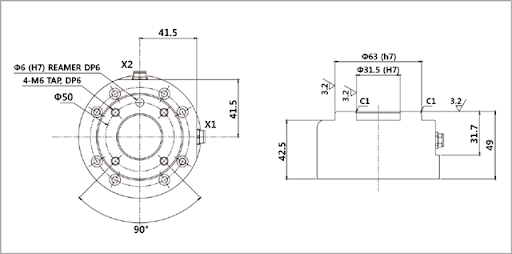
※ツールフランジの機械的仕様 – ISO9409-1-50-4-M6。
ロボットシステムの設置後、ユーザーは電源を入れることでロボットを起動させることができます。
※システムの電源が入らない場合は、コントローラーボックスの底面にある電源スイッチを確認してください。
ロボットの電源がオンになると、ロボット本体とティーチペンダントのLEDでロボットの状態を確認することができます。ロボットが初期化されると、LEDが赤く点滅します。

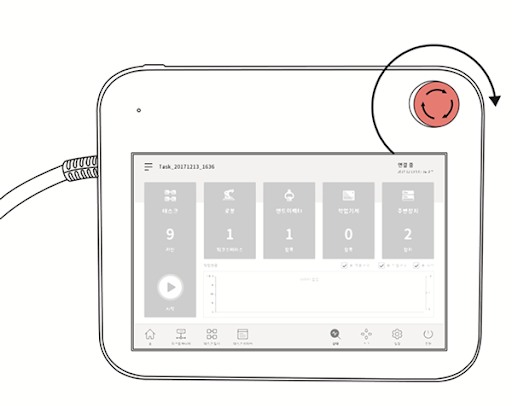
ロボット設置後、最初の起動が完了すると、ティーチペンダントの非常停止ボタンが押されたため、警告ポップアップが表示されます。この時、ロボットの動作を有効化するには、非常停止ボタンを解除する必要があります。
ロボットは、輸送や梱包を簡単に行えるようにパッケージングポーズで梱包されています。ロボットを使用するには、パッケージングポーズを解除する必要があります。また、ロボットを梱包する必要がある場合は、パッケージングモードを使用してパッケージングポーズに変更することができます。
パッケージングポーズを解除する際は、以下の手順に従ってください。
これで、ロボットを使用する準備が整いました。このセクションでは、ユーザーの環境に応じて、言語、日付、時刻、パスワードなどのオプションを設定する方法を学習します。
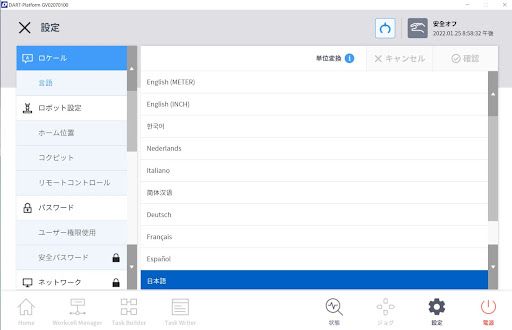
操作設定に関連する環境設定を構成するには、メインメニューの [設定] ボタンを押します。
[設定] メニューで、[ロケール] の下の [言語] を選択します。次に、言語リストから目的の言語を選択し、[確認] ボタンを押します。
※選択した言語を適用するには、システムを再起動する必要があります。
ロックマークの付いた設定メニューにアクセスする場合、ユーザーはパスワードを入力する必要があります。パスワードオプションを変更または無効にするには、[パスワード] メニューの [安全パスワード] を押します。

このコースでは、Doosanロボットの設置、使用方法を紹介しました。Doosanロボットは直感的なユーザーインターフェースと使いやすい機能を提供しますが、安全かつ効率的に使用するために、ユーザーはロボットの設置・起動方法を知っておく必要があります。設定メニューでは、ユーザーの環境に応じて、言語、日時、パスワードなどのさまざまなオプションを設定することができます。 詳細な手順については、導入マニュアルおよびユーザーマニュアルを参照してください。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
