Doosanロボットでは、Workcell Managerを使用してエンドエフェクタを設定できます。エンドエフェクタは行うタスクにあわせて、ロボットのツールフランジに直接取り付けて使用します。DoosanロボットはGripperSA(単動式グリッパー)とGripperDA(複動式)とツール(スクリュードライバー、グルーイングツールなど)を使用できます。 また、Doosan Mateでは、簡単に連携可能なパートナー企業の製品を確認できます。

一般的にロボットで使用されるグリッパーは、電気/空圧/真空グリッパーがあります。
電気グリッパーは、ロボットから供給される、または外部電源から供給される電力で動作するグリッパーです。指が取り付けられて物体をつかんだりはなしたりと、デジタル信号で動作します。電気グリッパーは、単につかむ/はなす動作の他、動作距離、力、速度などの制御が可能で、様々なアプリケーションに使用が可能です。
空圧/真空グリッパーは、コンプレッサーを利用して物体の表面に吸引する方向に垂直な負圧を生成して、物体に張り付きます。
フランジにM8 8ピンコネクタにケーブルを接続します。 Mシリーズの場合、コネクタはX1、X2の2つで、例えばX1に接続した場合、つかむ/はなす動作のポートはデジタル出力1~3になります。
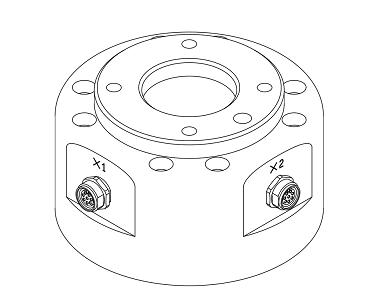
※フランジM8 8ピンコネクタ接続が可能なエンドエフェクタは、デジタルI/Oを使用するグリッパーに限定され、ModbusやEthernet通信が必要なグリッパーはロボットコントローラーのLANに接続する必要があります。


ツール中心位置を設定するときは、フランジ座標系を基準にして位置と一緒に回転角度を定義する必要があります。このとき、フランジ座標系の基準原点からツール中心位置までX、Y、Z各方向別距離が500mm以上になるように設定することはできません。


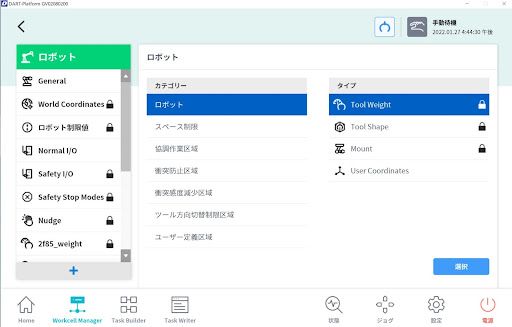
エンドエフェクタを使用するには、あらかじめロボットに使用するエンドエフェクタの重量を設定する必要があります。 [Workcell Manager] - [ロボット] - [toolWeight] から設定が可能です。自動計算または直接入力が可能です。
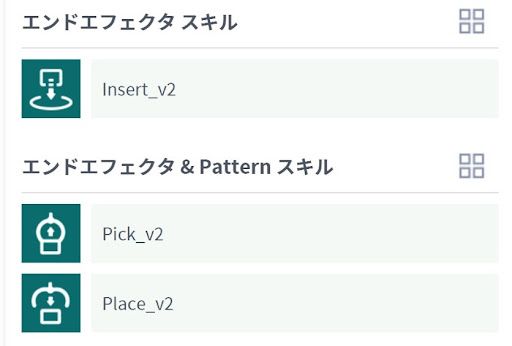
Doosanロボットはつかむ/はなす/挿入モーションが事前定義されています。また、PickやPlaceスキルを使用する際、別途のモーションコマンドを追加せずに接近/後退/移動などをコマンド内のプロパティで設定できます。
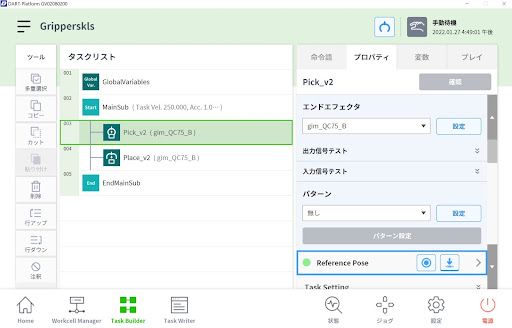
Workcell Managerでエンドエフェクタを設定したら、グリッパースキルのPickとPlaceを押してタスクを作成します。デジタルI/O設定が正しく、つかむ/はなすポーズを正確に入力すれば、Pick & Placeを簡単にプログラミングできます。詳しい設定方法はHow to -『【Task Builder】Pick&Placeスキルの使用方法』のコースをご覧ください。
Setを利用して、グリッパーのつかむ/はなす動作をデジタル出力信号(前述の通信設定で割りあてたフランジのポート番号を選択)に設定、フロー制御コマンドであるSubを利用して、作業中のつかむ/はなす動作制御が可能です。入力されたサブルーチンをインポートするCall Subを設定すると、該当作業タスクでグリッパーを閉じて対象物をつかむように設定できます。


今回のコースでは、Doosanロボットが提供するWorkcell Managerのグリッパーの使用方法を学びました。電気グリッパーの通信、TCP設定、グリッパースキルを利用して様々な作業が可能です。より詳細な使用方法は、リファレンスマニュアル/ユーザーマニュアルで確認できます。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
