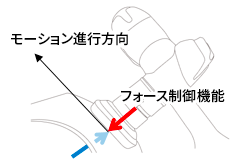
Doosanロボットが提供する高度な制御機能であるフォース制御(力制御)機能は、力の方向と目標値設定後、設定した力と平衡になるまで均一な力を維持し、反発力が大きくなると後退する機能です。フォース制御(力制御)機能は、主に研磨やバリ取りなど、ロボットの移動方向に関係なく一定の力を必要とする作業に使用します。
このプロセスでは、フォース制御(力制御)を使用したプログラミング方法について学びます。
表面の粗さが重要な研磨やワークピースの端部のバリを取り除くためのバリ取りでは、力の方向、サイズ、工具の回転速度が重要です。フォース制御(力制御)機能は外力がある場合にのみ作動し、最小0.2Nの感度を持ち、精密な作業に優れています。
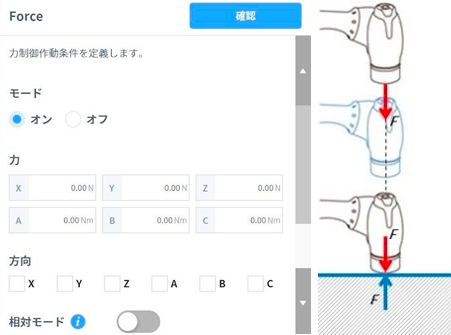
フォース制御(力制御)動作条件の詳細を見てみましょう。
※力制御は順応制御より反力で作用する力の値を正確に制御できます。
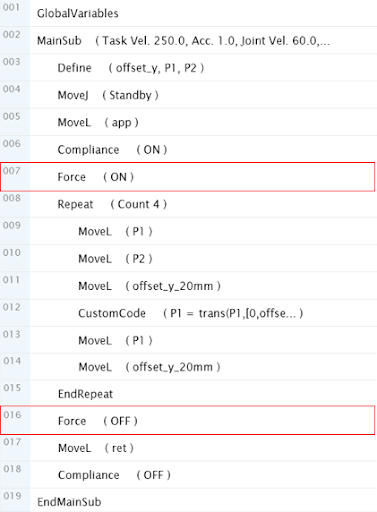
Task Writerの力制御コマンドを使用して、研磨作業を以下のようにプログラムします。力制御の場合は、順応制御と組み合わせて使用する必要があります。特定の方向に持続的な力を加えて平行になるためには、位置の誤差を許容する順応制御機能が必要です。
※力制御は、順応制御とともに一定の力を加えながら、他の方向にも力を維持しながら移動できます。また、力の感度が最小0.2 Nまで検出できるため、精密な作業に便利です。
今回のコースでは、Doosanロボットで力制御機能を利用したプログラミング方法を学びました。力制御は、設定した力や方向などに応じて力が平衡になるまで動作を継続する機能です。歯車の組み立てだけでなく、研磨、デバリングなど一定の力を加える作業にも使用できます。詳細については、リファレンスマニュアル/プログラミングマニュアルを参照してください。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
