Doosanロボットが提供するモーションコマンドは、ベーシックモーションとアドバンスモーションの2種類に分類できます。各タイプのモーションコマンドは次のとおりです。
このコースでは、5種類のアドバンスモーションコマンドを紹介します。
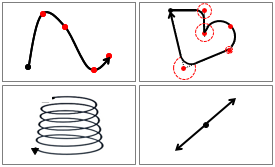
Move SX, Move SJ:スプラインモーションで様々なウェイポイント(経由点)と目標点を結ぶ曲線に沿ってロボットが移動します。
Move B:作業スペース内の複数のウェイポイント(経由点)と目標点からなる直線と円弧に沿ってロボットが移動します。
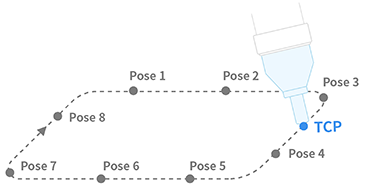
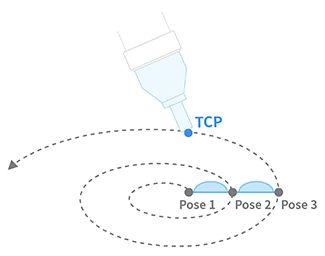
Move Spiral:中心から外側へと螺旋状に移動します。
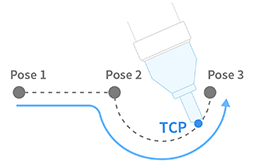
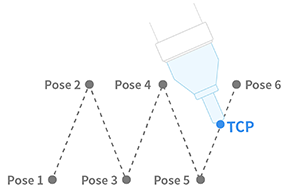
MovePeriodic:周期的に繰り返される動作を行います。
任意に入力したウェイポイント(経由点)から目標点に接続するスプライン曲線に沿って移動します。入力した変換速度と回転速度が移動の最高速度となり、速度オプションで「固定」を選択すると、条件に応じて入力した一定の速度で移動が可能です。
【やってみよう】
任意に入力したジョイント空間のウェイポイント(経由点)を経由して目標点を結ぶスプライン曲線に沿って移動します。モーションは、各関節の角度で表される複数のウェイポイント(経由点)と目標点を結ぶ曲線に沿って実行されます。入力された速度/加速度は、ルートの最大速度/加速度を指し、入力されたウェイポイント(経由点)の位置によって、動作中の減速度と加速度が決まります。
【やってみよう】
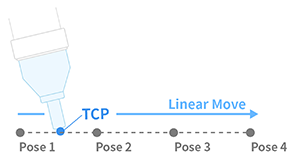
作業スペース内の複数のウェイポイント(経由点)と目標点によって結ばれた直線や円弧に沿ってロボットを移動させる際に使用されます。各区分は設定された半径の値にブレンドされ、一定の速度で移動します。ベーシックモーションコマンドのブレンディングモードは、ロボットがブレンディングポイントに到達すると、モーション中に [重畳] および [オーバーライド] オプションの値に従って実行されます。Move Bの場合、速度や経路などをあらかじめ設定してからモーションを実行します。
Move Bは、表面への液体の塗布など、一定の速度で動作する必要がある場合に使用され、動作フローがプロパティ値設定のブレンド可能範囲を超えると、動きが制限されます。
ブレンディング区分では、条件により急激な方向転換が発生した場合、ユーザー入力エラーが発生し、急加速を妨げます。
連続した線分が同じ方向である場合、線の入力が重なっているため、ユーザー入力エラーが表示されます。
【やってみよう】 1.MoveBのモーションプロパティで、Segment1:(MoveL)の任意の基準点と半径50mm、Segment2:(MoveC)の任意の基準点と半径100mmを設定して下さい。
半径方向に増加し、回転する螺旋運動と軸方向に平行に移動します。主に穴を見つけるために使用され、回転総数、回転軸、最大半径、軸間距離を指定する必要があります。
【やってみよう】
任意の開始点で合計3回転、ツールのX/Y平面から最大半径200mm、ツールのZ軸に向かって回転し、パフォーマンス時間が30秒のプログラムを作成します。
経路を作成する場合、安定した動作をする為に制限(スパイラル曲線を介した回転加速度)がある場合があります。このような場合は、速度、加速度の値、または時間を調整して値を下げることをお勧めします。
周期的に繰り返される経路に沿ってロボットを移動するために使用されます。任意に入力された基準座標の各軸(2進数および回転)に対して相対動作を行います。各軸のモーションの特性は、振幅と1回のモーションの繰り返しによって決まります。開始時と終了時の加速時間と減速時間、および合計動作時間は、周期と繰り返しで設定されます。
【やってみよう】
BASE座標系のX軸(振幅30mm、3秒周期)、Y軸(振幅30度、3秒周期)、A(振幅20度、3秒周期)、B(振幅20度、3秒周期)を合計5回繰り返すようにプログラムします。
動作中に最高速度エラーが発生した場合は、次の式を参照して振幅と周期を変更してください。
最高速度 = 振幅 (amp)*2 *pi(3.14) /周期 (period)
(たとえば、振幅 = 10mm、周期 = 1秒の場合、最大速度 = 62.83mm/s)
このコースでは、Doosanロボットが提供するアドバンスモーションコマンドを紹介しました。Task Builderを使用すると簡単なプログラミングが可能であり、Task writerは様々なコマンドと条件設定を使用してより高度な動作が実行できます。それぞれのモーション固有の機能を理解し、プロパティオプションを使いこなす必要があります。
※本資料に掲載されている全ての内容および全てのデザインは、Doosan Roboticsが著作権および知的財産権を有しています。従って、これらをDoosan Roboticsの書面による許可なく使用、複製、または配布することを禁じます。なお、Doosan Roboticsの特許権等を不正に使用、改変した場合、その責任はすべてお客様にあることをご了承ください。
